Reflecting On Embedded Systems Concepts With Arduino And FreeRTOS
TAGS: electronics; software; FreeRTOS; Arduino Nano; stepper motor; UART;
Why I Did This
In one of my university’s courses, we learned about real-time embedded systems. Real-time
operating systems are systems that strive to complete tasks within hard time limits; these
can be both scheduled and interrupt triggered tasks. They are important systems because not
only do they express high performance with their ability to respond, but they are suitable
for mission or safety critical systems (like vehicle accident black boxes, aircraft systems,
medical devices).
FreeRTOS is an example of a real-time operating system (it’s in the name). I learned that
you could import the FreeRTOS library on the Arduino IDE, so I wanted to reflect on the
concepts in learned in my course and how I could apply them to an Arduino project.
The main concepts our course focused on were: multi-tasking/concurrency and priorities;
queue containers; UART and SPI communications; device control (motors with opto-isolator,
displays, buttons, leds); hardware interrupts and polling;
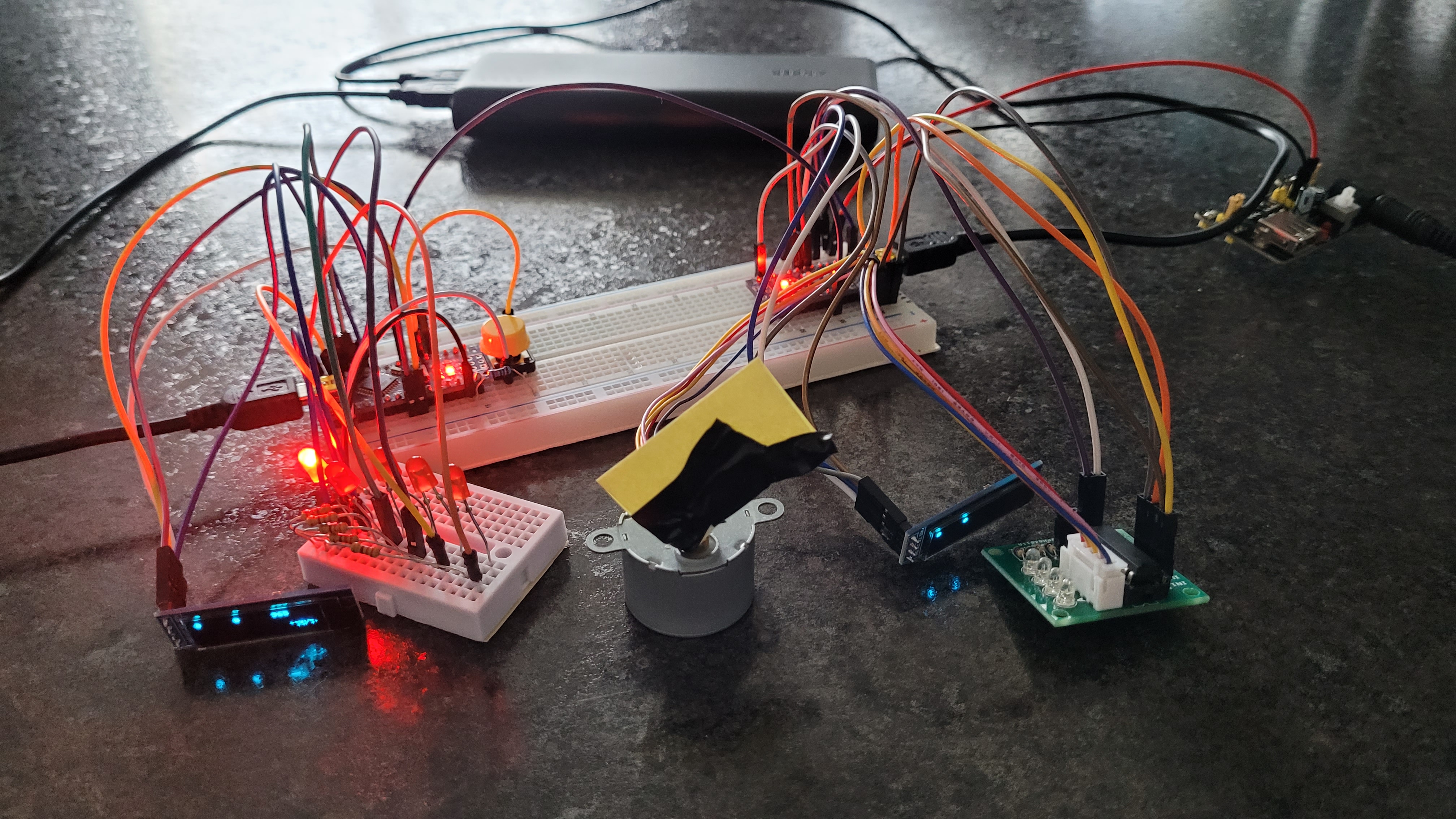
A dual Arduino Nano setup.
Left Nano with a button, LED array, OLED display, and acts as
UART sender.
The other right Nano with another OLED display, the UART receiver, and stepper motor
controller.
Design Walkthrough
Parts: 2x Arduino microcontroller (Nano); FreeRTOS library; 2x OLED displays; 5x LEDs; stepper motor (and ULN2003 driver)
I wanted to showcase as much of the concepts I listed above, so I made a scene where one
Arduino Nano is holding a hardware button and 2 prioritized (but concurrently acting) tasks
that log and trigger a UART communication (to a second Arduino Nano) when the button is
pressed. The first Nano, when hitting the button, will increment the display with ‘number of
button presses’, and trigger a led array to light sequentially along the array (1 to 5,
after a second each); when the final led is lit, a second display number will increment the
‘UART counts’ and the UART communication signal will send to the other Nano.
The second Arduino will receive the UART communication to display on the OLED an increment
of the ‘UART counts' log and trigger a stepper motor’s rotation. After the stepper is done a
revolution, the display will increment the ‘number of stepper revolutions’.
The first Nano’s display will also show an incrementing fast counter to act as a ‘heartbeat
counter’.
This dual Nano scene performs:
- multi-tasking/concurrency with the two tasks on the first Arduino that:
Task 1: increment the heartbeat counter and handle displaying all OLED information;
Task 2: handle the LED array animation and send UART communication to the other Nano;
- button triggering interrupts that increment a counter and trigger the led array.
- UART communication (with the aforementioned second task).
- stepper control from the second Nano.
The scene is missing concrete displays of:
- task prioritizations (the ‘led array’ task is higher priority that the ‘OLED’ task, but
they don’t really show their realized use in this example scene).
- queue containers (since I was passing single and int data between tasks and UART lines, it
isn’t the best example for me to use queues).
- SPI communications (I was using I2C for displays and UART for Arduino comms but didn’t
find an appropriate example to use SPI).
- polling (I didn’t have a good example of hardware attention checking).
I can probably make another scene on a different article to showcase these missing features,
but
for now I will use what I included.
- Button is pressed on left Arduino Nano, triggering an interrupt that increments the
first counter (Left Display, left number).
- Counter incrementing causes another task (LED array) to animate; after completing,
causes an
increment of another counter (Left Display, middle number) and triggers UART
communications to right Arduino Nano.
- Right Arduino Nano receives UART and increments another counter (Right Display,
left number).
- That incrementing causes the stepper motor to revolve; after completing revolution, causes an increment
of another counter (Right Display, right number).
- Also, first display has counter (Left Display, right number) that acts as a heartbeat,
but also displays concurrency as its 'incrementing' task isn't stalled when the same board's 'LED array' task is
activated.
Lessons Learned and Future Changes
Power of concurrency. Arduino alone is great for hardware/peripheral control/communication, and interrupts, but with adding FreeRTOS, you can make multiple tasks seem to work at the same time; this helps improve the value of a cheap single board microcontroller.Opto-mise it. I had at first attempted to use an opto-isolator with the stepper motor, but it wasn’t receiving the input signals, so I hard wired the inputs between the Nano and stepper. This is bad practise as motors can induce back voltage through the signal lines that will fry the board, but I was ok with risking it for a cheap Nano for the sake of this demo.
References
FreeRTOS website: https://www.freertos.org/index.html
FreeRTOS on Arduino: https://www.arduino.cc/reference/en/libraries/freertos/
Arduino UART tutorial: https://docs.arduino.cc/learn/built-in-libraries/software-serial
Stepper tutorial: https://www.arduino.cc/reference/en/libraries/stepper/
Robotics Back-End’s Arduino button interrupt tutorial:
https://roboticsbackend.com/arduino-interrupts/